為了演示山東威力重工2000噸冷風(fēng)機(jī)
四柱液壓機(jī)運動控制系統(tǒng)的特性,我們將在閉環(huán)定位伺服機(jī)構(gòu)中檢查氣門控制氣缸的測試結(jié)果,如圖1所示。否則稱為扭矩單元,該機(jī)構(gòu)設(shè)計用于特殊的電液運動 - 控制培訓(xùn)計劃。它的圓柱體有2英寸。鉆孔,1 3/8英寸。桿直徑,6英寸。行程。位置傳感器具有磁致伸縮功能,具有0至10 V模擬輸出。放大器是傳統(tǒng)的伺服閥驅(qū)動放大器。
定義參數(shù)
負(fù)載包括4英寸。厚度為250磅的飛輪,內(nèi)徑為16英寸。直徑。當(dāng)3.5英寸時,飛輪在氣缸桿上產(chǎn)生大約1500磅的等效質(zhì)量。扭矩臂垂直于氣缸桿。氣缸以曲柄方式連接到飛輪,如圖的右下方所示。該組合產(chǎn)生約20Hz的固有頻率。由于起動機(jī)構(gòu)提供的限制,氣缸的最大行程剛好低于整個6英寸。氣缸長度允許。
圖1.左側(cè)的位置,速度和加速度曲線用于在整個循環(huán)中控制伺服機(jī)構(gòu)。系統(tǒng)的示意圖顯示在右上方,機(jī)械配置的簡化圖顯示在右下方。
使用配備帶模擬輸入和輸出的通用數(shù)據(jù)采集卡的PC控制山東威力重工2000噸冷風(fēng)機(jī)四柱液壓機(jī)氣缸運動。還顯示了加速度,速度和位置輪廓。在輪廓的開始處發(fā)生0.6秒的初始停留(速度為零)。接著是18英寸/秒2的0.28秒的恒定加速周期。接下來是0.5秒的恒定速度,5.1英寸/秒(覆蓋大約2.5英寸的氣缸行程)。延伸結(jié)束時標(biāo)記為減速0.28秒,然后停留0.5秒。循環(huán)的縮回部分是對稱的,然而,它終止時的最終停留時間約為0.5秒。
使用VCCM計算機(jī)程序庫中的Profile Synthesizer模塊在PC上合成運動控制配置文件。沒有使用積分或微分控制 - 只有比例。
 圖片僅供參考,詳情請咨詢18306370979
圖片僅供參考,詳情請咨詢18306370979
三個關(guān)鍵點
必須提出三個要點:
1.即使該圖顯示三個配置文件,也只有位置配置文件用作命令。
計算機(jī) - 通過數(shù)模轉(zhuǎn)換器 - 僅用作任意函數(shù)發(fā)生器。它保存描述位置命令配置文件的點對點值的數(shù)據(jù),并提供“移動目標(biāo)”以將配置文件數(shù)據(jù)流式傳輸?shù)椒答伃h(huán)路(伺服)。
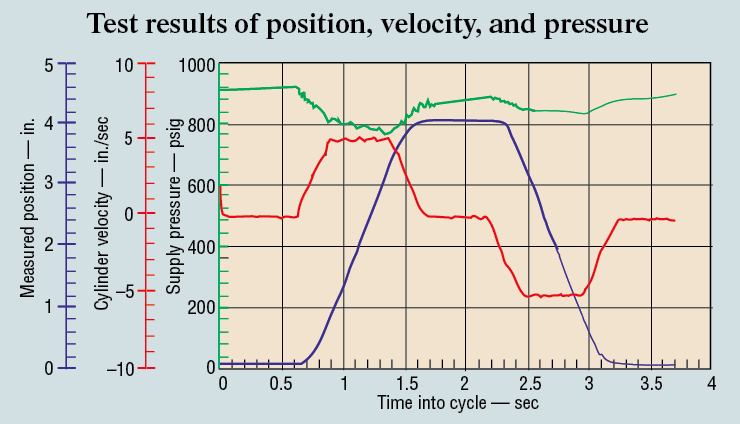
命令配置文件只不過是一個運動計劃,給伺服器提供了一些東西。但是,執(zhí)行器的實際運動將僅僅是命令配置文件的近似值,PC用作數(shù)據(jù)記錄器。PC不僅跟蹤山東威力重工2000噸冷風(fēng)機(jī)四柱液壓機(jī)氣缸在每個時刻的位置,而且還記錄其實際位置,實際速度以及氣缸壓力的瞬時值。
命令與輸出
圓柱體的實際運動與運動命令的匹配程度是本研究的主題。命令和反饋之間的差異是誤差信號,它是每個時刻命令配置文件和反饋信號之間的數(shù)值差異。
當(dāng)配置文件送入伺服機(jī)構(gòu)時,PC還會跟蹤并保存錯誤。顯而易見的是,山東威力重工2000噸冷風(fēng)機(jī)四柱液壓機(jī)電液運動控制系統(tǒng)性能的最關(guān)鍵指標(biāo)是誤差量。
一個完美的系統(tǒng)將沒有錯誤。實際上,性能越好,誤差越小。不太明顯的是,該技術(shù)允許設(shè)計系統(tǒng)以實現(xiàn)特定的最大誤差。這是可能的,因為跟隨誤差(當(dāng)以恒定速度推進(jìn)時命令和反饋之間的差異)與頻率響應(yīng)之間存在簡單的代數(shù)關(guān)系。
命令配置文件
最初構(gòu)造命令輪廓以產(chǎn)生4英寸的氣缸行程,最大穩(wěn)態(tài)速度約為5.1英寸/秒。循環(huán)的穩(wěn)態(tài)速度部分是速度恒定的時間 - 圖1中紅色輪廓的水平部分。
 圖片僅供參考,詳情請咨詢18306370979
圖片僅供參考,詳情請咨詢18306370979
該測試的第二個目的是評估循環(huán)操作期間供應(yīng)壓力的變化。這受到蓄能器(或缺少一個)和泵壓力補(bǔ)償器響應(yīng)時間的影響。蓄能器預(yù)充壓至700至750 psig之間的壓力,并在某些測試運行中啟用,在其他測試運行中禁用。這允許評估累加器的效果。
構(gòu)建整個停留 - 延伸 - 停留 - 收縮 - 停留循環(huán)以在3.71秒內(nèi)運行。這在延伸期間在氣缸蓋端產(chǎn)生了大約4.3加侖/分鐘的最大流量要求 - 這使得負(fù)載以5.1英寸/秒的速度推進(jìn)。這完全在山東威力重工2000噸冷風(fēng)機(jī)四柱液壓機(jī)壓力補(bǔ)償泵的流量范圍內(nèi),該泵在大約1200rpm下運行。泵補(bǔ)償器的最大壓頭壓力設(shè)定為1000 psi。泵輸出由1加侖氮氣蓄電池補(bǔ)充,以幫助滿足循環(huán)執(zhí)行器不斷變化的流量需求。
看看硬件
泵和伺服閥之間的管道由大約15英尺的SAE 100R2,3 / 8英寸組成。ID液壓軟管,額定壓力為4000 psi,并配有快速接頭。帶有設(shè)計用于1000至1350 psi操作的先導(dǎo)閥的20加侖/分鐘伺服閥直接安裝在氣缸上。請注意,山東威力重工2000噸冷風(fēng)機(jī)四柱液壓機(jī)電液運動控制系統(tǒng)最大泵供應(yīng)壓力幾乎不在閥門導(dǎo)向頭的正常壓力范圍內(nèi)。但是,這可能對可以得出的結(jié)果或結(jié)論沒有影響。制造商在伺服閥上的數(shù)據(jù)表明,基于90°相位滯后,它的頻率響應(yīng)約為50 Hz。
推薦閱讀
【本文標(biāo)簽】:四柱液壓機(jī),??2000噸液壓機(jī),??冷風(fēng)機(jī)液壓機(jī),??

備模鍛成型液壓機(jī)")
品中心") 產(chǎn)品中心Product
產(chǎn)品中心Product 新聞資訊Case
新聞資訊Case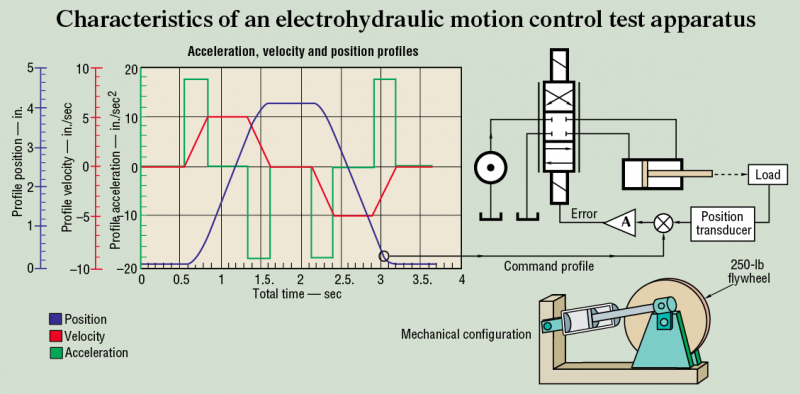

 微信公眾號
微信公眾號

