在液壓和電動部件之間的所有類比中,可能沒有一個比步進電機更相似。
1.基本的液壓步進電機從四個氣缸孔開始,排列在90度。間隔和一個偏心但圓形的凸輪連接在輸出軸上。
對鎂鐵磚粉末成型
四柱壓力機液壓步進電機的互聯網搜索將在該主題上產生至少一項專利。其中解釋的原理很簡單,并且當按照其最一般的概念進行時,可以幫助理解交流電動機和用于推動磁化轉子(同步電動機)或反電場的旋轉場,感應電流引入感應電動機轉子。
液壓步進電機的原理如圖1所示。它始于電動機的固定體,它安裝(在這種情況下)可以接收緊密配合活塞的孔。還示出了基本旋轉組件,即軸,在該軸上固定有非同心但完全圓形的凸輪。
2.帶有滾子的活塞插入孔中,并用光彈簧偏置,以保持滾子與凸輪接觸。
然后將活塞加到孔中(圖2)。活塞對齊,使其中心線與軸的旋轉中心重合。在圖中所示的位置,鍵槽將用作索引指針。這將被稱為輸出軸的12點鐘位置。
必須按特定順序對活塞施加壓力,以使轉子進入其12點位置并保持它。必須對P1施加壓力。在圖3中,P1活塞的加壓是通過將閥V1切換到其所示的接通狀態來實現的。請注意,其他三個閥門都顯示在各自的釋放位置,這些位置將各自的活塞腔排放到油箱。
3.增加了閥門來控制幾個活塞的開關狀態; V1顯示為ON狀態,對活塞P1加壓。
步進電機操作
該機器可以作為泵或馬達運行。但是,對于配置的閥門,將在其電機模式中進行說明。它應作為步進電機專門操作。事實上,如果有一個正式的名稱,它可能是“兩相,徑向活塞,固定排量,液壓步進電機。”當活塞依次用各自的閥門加壓時,旋轉組將轉90°度。每個加壓循環。圖4設置了從P1供電到P2供電的過渡。
4.示出的是在V1轉換到通風口P1之后扭矩產生,而V2轉換到功率P2,但運動尚未開始。力矢量產生轉動力。
以下是鎂鐵磚粉末成型四柱壓力機可視化液壓步進電機中扭矩產生的設置條件:首先,假設軸處于12點鐘位置,V1開始非常快速地從P1供電,同時V2就像突然轉移到電源P2一樣,如圖所示。閥門移動發生得如此之快,以至于軸還沒有機會移動。
隨后,在液壓施加到活塞P2上并且在活塞P1中釋放壓力的情況下,活塞P2產生與活塞面積乘以壓力的力。由于活塞P2的前端輥之間的低摩擦力,該力只能在垂直于輥和非同心凸輪外表面之間的切線的方向上傳遞。結果是作用在長度為BC的扭矩臂上的扭矩,這使得凸輪和軸逆時針旋轉。
5.穩態位置是9點鐘,P2加壓。
但是軸旋轉多遠?它將僅旋轉90度,直到鍵槽位于9點鐘位置(圖中未顯示)。然而,應該很容易看出,在9點鐘位置,凈活塞力直接通過軸中心線,因為滾子到凸輪接觸的點垂直于P2中心線。不會產生扭矩,轉子將停在9點鐘位置。通過以適當的順序一次移動一個閥門,可以使軸一次移動1/4圈(圖5 和18)。
電機類型互相鏡像
6. P2活塞通電后,穩態位置為6點鐘。
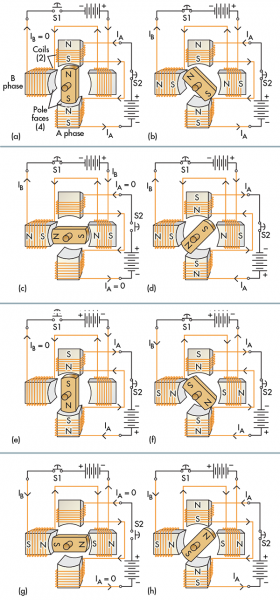
這種鎂鐵磚粉末成型四柱壓力機液壓步進電機完全類似于電動步進電機,圖7,其步驟包括同時激勵相鄰的定子線圈。結果是能夠在12,9,6和3點鐘位置之間實現中間軸位置。使用液壓步進電機也可以實現同樣的目的。實際上,如果P1到P3差壓是余弦函數而P2到P4壓力是正弦函數,則電機將以正弦和余弦函數的頻率旋轉。
7.當控制系統允許同時和單獨地激勵兩個相時,通過開關操作和電流方向(電池極性)的適當同步,可以實現中間角位置。
從用戶的角度來看,步進電機的使用有一個簡單的前提:我們希望發送一系列電子脈沖,并使每個脈沖產生輸出軸的特定角位置變化。例如,我們可能想要一個由例如52個脈沖組成的脈沖序列,以使軸角度精確地改變52度。用戶友好系統背后的基本思想如圖8所示。精確的增量分配要求精確控制和協調活塞壓力。
在這個例子中,步進電機系統的分辨率為1度。每個輸入脈沖。然后,通過導螺桿,齒條和小齒輪或其他旋轉 - 線性轉換器,可以實現線性位置,而無需閉環反饋控制系統。當控制器由圖1和2中建議的簡單開關閥系統組成時。在圖3至18中,系統的分辨率是90-deg./pulse(閥門移位操作,一次一個)。需要更復雜的電子控制方法,允許所謂的微步進。
鎂鐵磚粉末成型四柱壓力機液壓步進電機的微步進
微步進是一種控制方法,它利用了同時向多于一個活塞施加壓力的能力,允許大量的中間步驟。前面的圖表顯示了一個兩相步進電機,它有四個活塞,每個活塞移動90度。來自鄰居。
8.從用戶的角度來看,基本的步進電機控制器是一系列電子脈沖將產生精確和可預測的軸位置。
如前所述,每個活塞的單獨激勵分別導致90度的倍數的角運動。因此,原始步長(其分辨率)為90度。每個閥門移位事件。然而,還解釋了如果兩個活塞同時加壓則可以獲得中間位置。如果兩個壓力相等,則可以是10:30,7:30,4:30和1:30的中間19個位置。在不同的壓力下,其他中間位置是否可能?非也!
液壓步進電機的簡單幾何形狀,主要由非同心但圓形的轉子凸輪和90度。活塞位移,適用于正弦波和余弦波激勵,以實現微步進以及可選的連續旋轉運動,如同傳統電機一樣。基本思想如圖9所示。
9.通過在P2-to-P4活塞對和P1-to-P3活塞對上分別使用受控正弦和余弦波,液壓步進電機可以進行微步進。
通過以余弦波的形式控制P1至P3壓力并將P2至P4壓力控制為正弦波,存在實現任何期望的最終停止點的可能性。兩個波形及其數字等效物如圖10所示。
脈沖串Interprete [R
為了實現微步進,必須擴展圖8中的簡化控制器,以便仔細查看“步進電機控制器”框內的內容。其中一些細節如圖9所示。
在這里,可以看到有一個“脈沖序列解釋器”電子功能。這實際上是一個具有數學功能的數字控制器(控制計算機) - 它可以接受和處理脈沖序列,并生成控制兩個差分輸出壓力所需的正弦和余弦信號,這兩個差分輸出壓力轉到P1到P3和P2分別為-P4活塞對。該脈沖序列解釋器功能還跟蹤通過輸入脈沖序列接收的脈沖的凈數量; 這讓控制器“知道”軸的位置。
在圖10中,余弦和正弦波以其“理想形式”顯示為黑色波形。在數字系統中,一切都是按步驟或以有限的增量完成的(這些以紅色顯示)。它產生的波浪形狀是階梯式的,通過非常快速(垂直)的變化將停留水平連接在一起。這是數字世界的現實,實際上是微步控制系統和電機的一個優點。
該脈沖串解釋器還接收第二輸入,標記的方向位在圖9中方向位為單行輸入要么是邏輯1或邏輯0,它告訴解釋器軸旋轉的方向通過控制活塞壓力變化的順序。
這種需求最好見于圖4.如圖所示,軸的旋轉將是逆時針的。對于持續的逆時針旋轉,閥門順序為V2,V3,V4,V1,V2等。但是,如果順序反轉為V4,V3,V2,V1,V4等,則順時針旋轉。無論壓力是圖4的簡單情況還是圖4和16的更復雜的微步進控制,這種定向協議都是必要的。20和21。
正弦和余弦壓力控制器
圖9中的正弦和余弦壓力控制器接收來自脈沖序列解釋器的數字化正弦和余弦信號(圖10中的紅色波形)并產生比例差壓。它們可能包括由PID伺服放大器驅動的伺服閥,在閉環配置下運行,壓差由壓差傳感器測量。
該方法確保兩個差壓遵循它們各自的階梯命令,并且基本上為零穩態誤差。準確控制兩個壓力對于精確的微步進是絕對必要的。
圖10中的停留間隔在角度和時間上都是稍微任意的間隔。就時間而言,它基本上是脈沖序列中連續脈沖之間的時間。早些時候,討論了1度/脈沖的步進分辨率。在圖10中,分辨率更高 - 實際上,它是22½度。繪圖是用16個步驟完成的,因為360個步驟在這么小的數字上是不可見的。所以,360度/ 16 =22½度。
當輸入脈沖序列繼續時,兩個壓力沿著圖10的紅色軌跡上升。同時,軸與壓力同步地行進,條件是步驟不會太快到達。如果超過發送脈沖的某個最大速率,軸將落在脈沖序列后面,導致輸出位置出錯。
10.對于微步進,控制器產生余弦波和正弦波以產生小的角度變化,但實際信號是數字的,因此是階梯波形。
除非發生這種可能性,當脈沖列停止時,軸停止,并處于正確的位置。當脈沖停止時,壓力停止變化,軸保持在最新位置。當脈沖停止到達時,壓力不會變為零。相反,它們通過加壓活塞的恢復扭矩保持在與圖10的階梯波形相當的那些值。
推薦閱讀
【本文標簽】:鎂鐵磚,??進步電機,??

 產品中心Product
產品中心Product 新聞資訊Case
新聞資訊Case


 微信公眾號
微信公眾號

